Neuron Library¶
Neuron Library is the API library for ADLINK products, such as ROScube-I and ROScube-X providing a common API to control the peripheral I/O of the controller, and includes examples for various programming languages.
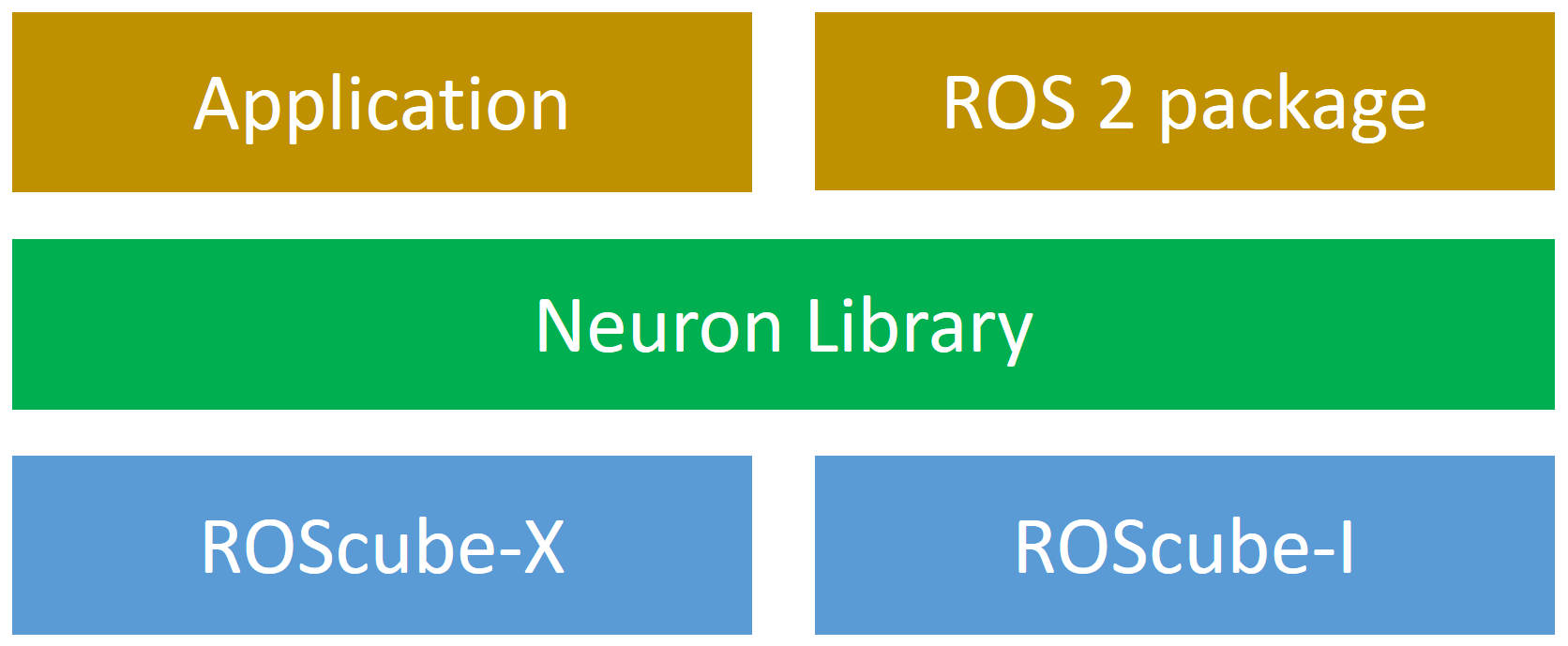
As shown in the diagram below, Neuron Library provides the interfaces between your program and the hardware. Instead of controlling I/O using Linux commands and modifying your code for each platform, you just need to call the API from the Neuron Library. You can port your code between ROScube-I and ROScube-X without any modifications, only rebuilding is needed.
Since ROScube-I and ROScube-X are products that are mainly used for ROS based projects, some ROS 2 (Foxy) examples are provided to demonstrate how to use these APIs on ROS 2. You can rewrite these examples to build your own programs.
Supported Models:
ROScube-I series
ROScube-X series
Table of Contents: